arduino 测速模块,arduino测速模块用法
时间:2024-09-12 来源:网络 人气:
arduino 测速模块目录
arduino 测速模块
Arduino:原理,应用和实现。
Arduino是一款开放源代码的微机平台,由于其易用性和高功能性,深受电子爱好者、教育工作者和工程师的欢迎。测速模块是Arduino项目中常见的应用之一。本文将详细介绍Arduino测速模块的原理、应用和实现方法。
标签:Arduino测速模块的原理。
一、测速模块的原理
测速模块通常是基于编码器实现的。编码器是将旋转运动转换成电信号的传感器。根据编码器的类型,可以分为delta型编码器和绝对型编码器。Arduino通常使用delta编码器来测量速度。
delta编码器通常有A、B、Z三个管脚,A和B管脚输出方波信号,Z管脚输出脉冲信号。通过检测A引脚和B引脚的信号变化,可以确定编码器的旋转方向和速度。
标签:编码器信号。
二、测速模块的类型。
根据编码器输出的信号,测速模块可以分为以下几种:
1通道编码器:仅用A管脚或B管脚输出信号,不能决定旋转方向。
双通道编码器:A脚和B脚同时输出信号,并决定旋转方向。
四通道编码器:除了A和B管脚,Z管脚也输出脉冲信号,提供更精确的测速。
标签:Arduino应用。
三、测速模块Arduino的应用
Arduino测速模块被广泛应用于多个领域。
机器人运动控制:通过测速模块,实时监测机器人的运动速度和方向,实现精确的运动控制。
电机控制:在电机控制系统中,测速模块可以监测电机的转速,并进行相应的调整。
动作检测:在动作检测系统中,测速模块可以监测物体运动的速度和方向。
标签:实现方法。
四、Arduino测速模块的安装方法
下面是使用Arduino测速模块的简单方法,使用双通道编码器测速。
连接编码器。将编码器的A引脚和B引脚分别连接到Arduino的数字引脚,例如D2和D3。
编写程序:用Arduino IDE编写程序,读取编码器的信号,计算旋转次数。
编译和上传程序:编译程序并上传至Arduino板。
测试:连接电源,观察Arduino串行显示器的转速数据。
标签:代码示例。
五、Arduino测速模块的代码示例
```cppconst int pinA = 2;//编码器A引脚连接在Arduino的D2引脚上。//编码器B引脚连接到Arduino的D3引脚volatile long count = 0;//计数器unsigned long lastTime = 0;//上次的更新时间float speed = 0;//旋转次数void setup() {pinMode(pinA, INPUT);是pinMode(pinB、INPUT)。attachInterrupt(digitalPinToInterrupt(pinA), updateCount, CHANGE)。attachInterrupt(digitalPinToInterrupt(pinB), updateCount, CHANGE)。是serial.begin(9600);}void loop() {unsigned long currentTime = millis();if (currenttime-lasttime >= 1000){//每秒更新一次转速speed = count / (currenttime-lasttime) 1000;//计算旋转次数(每秒)serial.print (arduino测速模块用法">arduino测速模块用法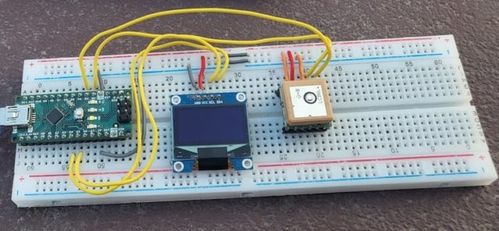
3Arduio测速模块的概况
Arduio测速模块是通过测量通过特定距离所需的时间来测量速度的传感器。该模块通常与Arduio微控制器配合使用,广泛应用于机器人、自动化机器、运动分析等领域。
3Arduio测速模块的类型
Arduio测速模块主要有以下几种。
光传感器测速模块。
霍尔效应测速模块。
编码器测速模块。
超声波测速模块。
3光电传感器测速模块的使用方法。
光传感器测速模块通过发送和接收光来检测物体的运动。使用光电传感器的测速模块的基本步骤如下所示。
连接模块。
将光电传感器测速模块的VCC, GD,信号线分别连接到Arduio的5v, GD,数字引脚。
编写程序。
用Arduio IDE写程序,读取光电传感器模块的信号,计算速度。
并上传程序。
然后把程序上传到Arduio板上。
测试模块。
光传感器?在模块的出光和受光之间放置物体,Arduio串行。看监视器上显示的速度值。
3霍尔效应测速模块的使用方法。
霍尔效应测速模块通过检测磁场的变化来测量物体的旋转次数。以下是使用霍尔效应测速模块的基本步骤。
连接模块。
将霍尔效应测速模块的VCC、GD和信号线分别连接到Arduio的5v、GD和数字引脚。
编写程序。
用Arduio IDE编写程序,读取霍尔效应模块的信号,计算旋转次数。
并上传程序。
然后把程序上传到Arduio板上。
测试模块。
将物体放置在霍尔效应测速模块的磁场范围内,Arduio串行?观察显示器上显示的转速值。
3编码器测速模块的使用方法
编码器测速模块通过检测编码器的脉冲信号来测量物体的旋转次数。以下是使用编码器测速模块的基本步骤。
连接模块。
将编码器测速模块的VCC、GD、A、B信号线分别与Arduio的5v、GD、2个数字引脚连接。
编写程序。
用Arduio IDE编写程序,通过中断和轮询读取编码器的脉冲信号,计算旋转次数。
并上传程序。
然后把程序上传到Arduio板上。
测试模块。
将对象连接到编码器,进行Arduio串行?看监视器上显示的转速值。
3超声波测速模块的使用方法
超声波测速模块通过发送和接收超声波脉冲来测量物体的速度。使用超声波测速模块的基本步骤如下。
连接模块。
将超声波测速模块的VCC、GD、Trig和Echo信号线分别连接到Arduio的5v、GD和2个数字引脚。
编写程序。
通过Arduio IDE制作了控制超声波模块发出脉冲,测量接收脉冲的时间并计算速度的程序。
并上传程序。
然后把程序上传到Arduio板上。
测试模块。
超声波测速模块的收发之间放置物体,Arduio串行?观察显示器上显示的速度值。
3注意事项
当你使用Arduio测速模块时,你必须小心。
arduino测速程序

Arduio测速程序详解:从原理到实践
Arduio是一款开源的微机平台,由于其易用性和功能性强,被广泛应用于电子和机器人领域。本文将详细介绍使用Arduio测速的原理、所需材料、编程步骤以及实际应用方法。
3标签:Arduio,测速,编程
3一、测量速度的原理。
测速的基本原理是通过测量某一时间内移动的物体的距离来计算速度。在Arduio中,常用的测速方式有编码器测速、超声波测速、GPS测速等。这篇文章的重点是编码器测速。
3标签:测速原理,编码器
3 2、必要的材料
1. Arduio开发板(Arduio Uo、Arduio ao等)。
2.编码器(增量编码器、绝对编码器等)
3.杜邦线。
4.马达驱动模块(L298、A4988等)。
5.马达。
6.电源
标签:材料列表,编码器。
3 3,编程的步骤。
1.连接编码器:将编码器的A、B、Z引脚分别连接到Arduio的数字引脚。A、B引脚检测编码器的旋转方向,Z引脚检测编码器的零点。
2.编码器的初始化:用Arduio的setup()函数将编码器的引脚模式设置为输入模式,启用中断。
中断服务程序的编写:中断服务程序读取编码器A、B引脚的状态,根据状态变化计算编码器的旋转方向和旋转角度。
4.计算速度:根据编码器的旋转角度和测量时间,计算物体的速度。
5.主循环:在主循环中,经常读取编码器的旋转角度,更新速度值。
3标签:程序程序,服务中断程序。
3 4,代码示例。
定义编码器引脚cost it ecoderPiA = 2;cost it ecoderPiB = 3;cost it ecoderPiZ = 4;//定义变量volatile log ecoderPositio = 0;= 0。usiged log lastTime = 0。float speed = 0.0。void setup() {piMode(ecoderPiA, IPUT);piMode(ecoderPiB, IPUT)。piMode(ecoderPiZ, IPUT)。attachIterrupt(digitalPiToIterrupt(ecoderPiA), ecoderIterrupt, CHAGE);attachIterrupt(digitalPiToIterrupt(ecoderPiB), ecoderIterrupt, CHAGE);}void loop() {usiged log curretTime = millis();if (currettime-lasttime > 1000){//每秒刷新一次速度speed = (recollepositio -lastecoderpositio) /(currettime-lasttime)1000。//单位:cm/s lastEcoderPositio = ecoderPositio;lastTime = curretTime。}}void ecoderIterrupt() {it aState = digitalRead(ecoderPiA);it bState = digitalRead(ecoderPiB)。if (aState != lastEcoderPositio) {if (bState != aState) {ecoderpositio++;是else {ecoderPositio——;lastEcoderPositio = aState;}```3标准:例如代码,编程。
3 5,实际应用。
Arduio测速程序在以下场景中被广泛使用。
1.机器人的运动控制:通过测速,可以准确地控制机器人的运动速度和方向。
2.电机控制:根据测速结果,调整电机的PWM占空比,实现精确的速度控制。
3.物体运动监测:通过测定速度,可以监测物体的运动状态,如速度、加速度等。
标准:实用,机器人。
3 6,总结
Arduio是一种简单实用的技术,可以准确测量物体的运动速度。通过这篇文章,相信大家已经对Arduio测速有了基本的了解。在实际应用中,你可以根据需要选择合适的测速方法并编写程序。
标准:统一测量速度。
arduino测实时车速度
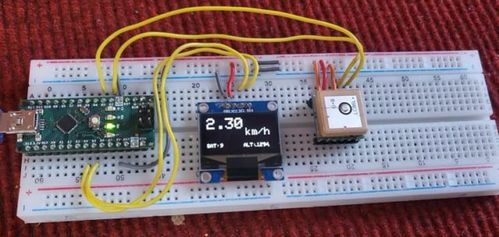
实现了3Arduio实时车速监控系统
随着技术的发展,Arduio作为开源微控制器平台,因其易用性和灵活性,被广泛应用于各种创意项目和实用工具。在这篇文章中,我将介绍一种构建实时速度检测系统的方法,使用Arduio可以轻松地实时显示车辆的速度。
3标签:Arduio,车速检测,传感器,编程
3一、项目背景和需求。
很多时候,我们需要实时掌握车速。例如,汽车驾驶培训、车辆性能测试、某些产业用途等。传统的车速检测方法需要复杂的设备和成本。另一方面,使用Arduio的车速检测系统成本低、操作简单,适合个人学习和项目实践。
标签:项目背景,需求分析
3 2、系统构成及工作原理
本车速监控系统主要由以下部分组成:
Arduio微控制器:作为系统的核心,进行数据的处理,显示的控制,与传感器的通信。霍尔传感器:检测车轮的旋转次数,根据车轮磁场的变化产生脉冲信号。通过电子管和LCD显示器实时显示车速车轮:汽车的速度取决于车轮的旋转次数。工作原理是这样的。
车轮上的磁铁通过霍尔传感器产生脉冲信号。Arduio读取脉冲信号,计算脉冲频率,得到车轮的旋转次数。根据车轮的周围和转速来计算车速。用数字管和LCD显示器显示车速数据。标签:系统结构,工作原理
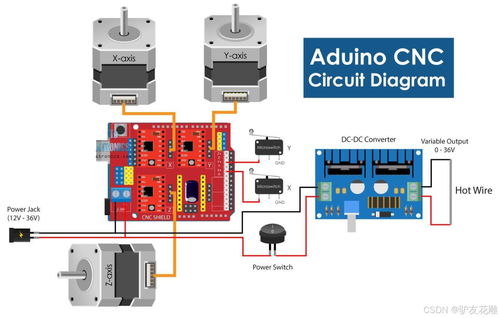
3 3、硬件的选择和连接。
以下是本项目硬件的选择和连接方法。
Arduio: Arduio Uo和Arduio Mega都可以。霍尔传感器霍尔效果旋转传感器等数字管和LCD显示器:TM1637模块和LCD1602显示器等。车轮:汽车的车轮,汽车的车轮等,任何可旋转的物体。连接方法。
将霍尔传感器连接到Arduio的数字引脚。将数字管或LCD显示器连接到Arduio的数字管脚。用磁铁固定车轮。3标准:硬件选择,连接方法。
3 4、软件编程与调试。
下面是Arduio的程序过程和调试方法。
编写Arduio代码,实现以下功能:初始化传感器和显示器。读取霍尔传感器的脉冲信号。计算车轮的转速和速度速度数据显示在数字管和LCD显示器上。把代码上传到Arduio。检查传感器和显示器是否正常。调整代码参数,确保正确的速度数据。3标签:软件编程,调试方法。
3 5、总结和展望。
本文将介绍使用Arduio构建实时车速检测系统的方法。通过实践本项目,可以了解到Arduio在车速检测方面的应用,以及使用传感器和显示器实时显示数据的方法。未来,该系统还可以进一步扩展,增加数据存储、远程监控等功能,使其更加实用和智能。
3标准:展望。
相关推荐




教程资讯
教程资讯排行