
agv控制系统原理,AGV控制系统原理详解
时间:2024-11-06 来源:网络 人气:
AGV控制系统原理详解
随着工业自动化和物流行业的快速发展,自动导引小车(AGV)作为一种重要的自动化搬运设备,其控制系统原理的研究和应用日益受到重视。本文将详细介绍AGV控制系统的原理,帮助读者更好地理解这一技术。
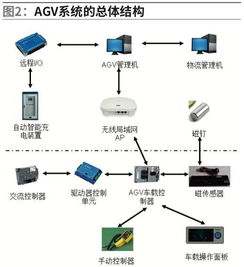
AGV控制系统是AGV的核心部分,它负责对AGV进行导航、路径规划、任务分配、状态监控等功能。一个典型的AGV控制系统通常包括以下几个部分:
地面控制系统
车载控制系统
导航/导引系统
传感器系统
执行机构
地面控制系统是AGV系统的核心,主要负责任务分配、车辆调度、路径管理、交通管理、自动充电等功能。它通常由以下几部分组成:
中央控制计算机:负责处理整个AGV系统的数据,进行任务分配和调度。
通信网络:连接地面控制系统和车载控制系统,实现数据传输。
人机界面:提供操作人员与系统交互的界面。
车载控制系统是AGV的“大脑”,负责接收地面控制系统的指令,控制AGV的导航、路径规划、任务执行等。其主要功能包括:
接收地面控制系统的指令
进行路径规划
控制AGV的导航和运动
执行任务
状态监控
导航/导引系统是AGV实现自主导航的关键,它负责确定AGV的位置和行驶路径。常见的导航/导引系统有:
电磁感应导航:通过地面铺设的电磁感应轨道实现AGV的导航。
激光导航:利用激光扫描器测量周围环境中的反射物距离和角度,通过算法计算出AGV的位置和姿态。
磁条导航:通过在地面铺设磁条,AGV通过检测磁条产生的磁场信号来确定自身的位置和行驶方向。
视觉导航:通过摄像头捕捉环境图像,利用图像处理技术识别地标或特征,从而确定AGV的位置和行驶路径。
传感器系统是AGV感知周围环境的重要手段,它负责收集AGV周围的信息,为导航/导引系统和车载控制系统提供数据支持。常见的传感器有:
超声波传感器:通过发射超声波并检测其反射回来的时间,测量与障碍物的距离。
红外传感器:利用红外辐射感知物体的存在和距离。
激光雷达:通过发射激光束并测量其反射回来的时间和角度,获取周围环境的三维信息。
执行机构是AGV实现任务执行的关键,它负责将车载控制系统的指令转化为实际的机械动作。常见的执行机构有:
驱动单元:负责AGV的移动和转向。
装卸机构:负责AGV的货物装卸。
显示屏:显示AGV的状态信息和操作指令。
智能化:通过引入人工智能技术,实现AGV的自主学习和决策。
网络化:通过构建更加完善的通信网络,实现AGV的远程监控和控制。
柔性化:通过优化导航/导引系统和传感器系统,提高AGV的适应性和灵活性。
通过以上对AGV控制系统原理的详细介绍,相信读者对这一技术有了更深入的了解。随着AGV技术的不断发展,其在工业自动化和物流行业的应用将越来越广泛。
相关推荐

教程资讯
教程资讯排行









