agv小车控制系统,AGV小车控制系统的设计与实现
时间:2024-10-15 来源:网络 人气:
AGV小车控制系统的设计与实现

随着工业自动化和智能化水平的不断提高,自动引导车辆(AGV)在物流、制造等行业中的应用越来越广泛。AGV小车控制系统作为AGV的核心部分,其设计与实现直接影响到AGV的运行效率和稳定性。本文将详细介绍AGV小车控制系统的设计与实现过程。
一、AGV小车控制系统的组成

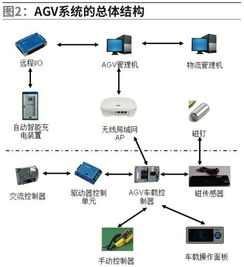
AGV小车控制系统主要由以下几个部分组成:
传感器模块:用于检测AGV小车周围的环境信息,如距离、障碍物等。
控制器模块:负责接收传感器模块的数据,并根据预设的程序进行决策和控制。
驱动模块:根据控制器模块的指令,驱动AGV小车进行运动。
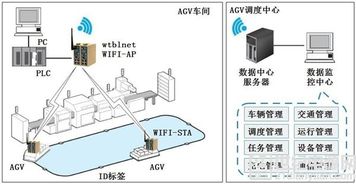
通信模块:负责AGV小车与上位机或其他AGV小车之间的通信。
二、传感器模块的设计
传感器模块是AGV小车控制系统的关键部分,其性能直接影响到AGV小车的运行安全。以下是几种常见的传感器及其应用:
红外传感器:用于检测AGV小车前方的障碍物,实现避障功能。
超声波传感器:用于检测AGV小车周围的障碍物,实现避障和定位功能。
激光雷达:用于检测AGV小车周围的环境,实现高精度定位和导航。
三、控制器模块的设计

控制器模块是AGV小车控制系统的核心,其设计主要包括以下几个方面:
算法设计:根据传感器模块获取的数据,设计相应的控制算法,实现对AGV小车的精确控制。
程序编写:根据算法设计,编写控制器模块的程序,实现AGV小车的运动控制。
硬件选型:根据控制算法和程序需求,选择合适的控制器硬件,如单片机、PLC等。
四、驱动模块的设计
驱动模块负责将控制器模块的指令转换为AGV小车的运动。以下是几种常见的驱动方式:
直流电机驱动:适用于中小型AGV小车,具有结构简单、成本低等优点。
步进电机驱动:适用于对运动精度要求较高的AGV小车,具有定位精度高、响应速度快等优点。
伺服电机驱动:适用于对运动速度和精度要求较高的AGV小车,具有响应速度快、控制精度高等优点。
五、通信模块的设计

通信模块负责AGV小车与上位机或其他AGV小车之间的通信。以下是几种常见的通信方式:
有线通信:通过有线电缆实现AGV小车与上位机或其他AGV小车之间的通信,具有传输速度快、稳定性高等优点。
无线通信:通过无线信号实现AGV小车与上位机或其他AGV小车之间的通信,具有安装方便、灵活性好等优点。
AGV小车控制系统是AGV的核心部分,其设计与实现直接影响到AGV的运行效率和稳定性。本文从传感器模块、控制器模块、驱动模块和通信模块等方面详细介绍了AGV小车控制系统的设计与实现过程,为AGV小车控制系统的研发和应用提供了参考。




教程资讯
教程资讯排行