ahrs航姿参考系统,飞行器的“眼睛”与“大脑”
时间:2024-10-12 来源:网络 人气:
AHRS航姿参考系统:飞行器的“眼睛”与“大脑”
什么是AHRS航姿参考系统?
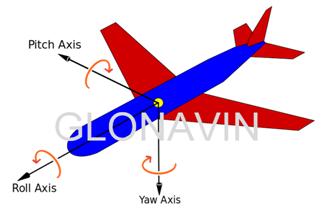
AHRS航姿参考系统,即姿态和航向参考系统,是一种能够为飞行器提供横滚、俯仰、航向等姿态与航行信息的系统。它主要由加速度传感器、陀螺仪和磁力传感器等组成,通过这些传感器获取飞行器的运动状态,并利用卡尔曼滤波等算法进行处理,最终输出飞行器的姿态与航行信息。
AHRS航姿参考系统的工作原理
AHRS航姿参考系统的工作原理主要包括以下几个步骤:
传感器采集数据:加速度传感器、陀螺仪和磁力传感器分别采集飞行器的加速度、角速度和磁场信息。
数据融合:将采集到的数据进行融合处理,消除误差,提高精度。
姿态解算:根据融合后的数据,利用卡尔曼滤波等算法解算飞行器的姿态信息。
输出结果:将解算出的姿态信息输出,供飞行器控制系统使用。
AHRS航姿参考系统的应用领域
无人机:为无人机提供姿态与导航信息,实现自主飞行。
飞行器:为飞行器提供姿态与导航信息,提高飞行稳定性。
卫星:为卫星提供姿态与导航信息,提高卫星观测精度。
船舶:为船舶提供姿态与导航信息,提高船舶航行安全性。
机器人:为机器人提供姿态与导航信息,实现自主导航。
AHRS航姿参考系统的优势

AHRS航姿参考系统具有以下优势:
高精度:通过卡尔曼滤波等算法,提高姿态与导航信息的精度。
高可靠性:采用高精度传感器和先进的算法,提高系统的可靠性。
小型化:采用先进的MEMS传感器技术,实现小型化设计。
低功耗:采用低功耗设计,延长电池寿命。
AHRS航姿参考系统的未来发展趋势

更高精度:采用更高精度的传感器和算法,提高姿态与导航信息的精度。
更小型化:采用更先进的MEMS传感器技术,实现更小型化设计。
更高集成度:将更多功能集成到单个芯片中,提高系统的集成度。
更广泛应用:在更多领域得到应用,如自动驾驶、虚拟现实等。
作者 小编
相关推荐


教程资讯
教程资讯排行